ESP32-Cam NRF24L01 Radio Spectrum Data Logger
This post will cover recent uses of the NRF24L01 with the EPS32-Cam module. An earlier example used an the NRF24L01 module attached to an Arduino Uno, a laptop, and a logged putty session, details can be found here, https://www.cloudacm.com/?p=3836. This configuration had limitations due to its size, the required pieces of equipment, and operating steps. The purpose of this scanner type is to survey 2.4Ghz radio transmissions. The NRF module can detect power levels across the band and store those values into its register. The band resolution can increased, but doing so will increase the amount of time needed for the module to complete a scan. A microcontroller is used to operate the NRF module and to read the values stored in the module’s register. These readings can then be stored, in this case to microSD storage in the form of a CSV file. Below is an example of a plot.
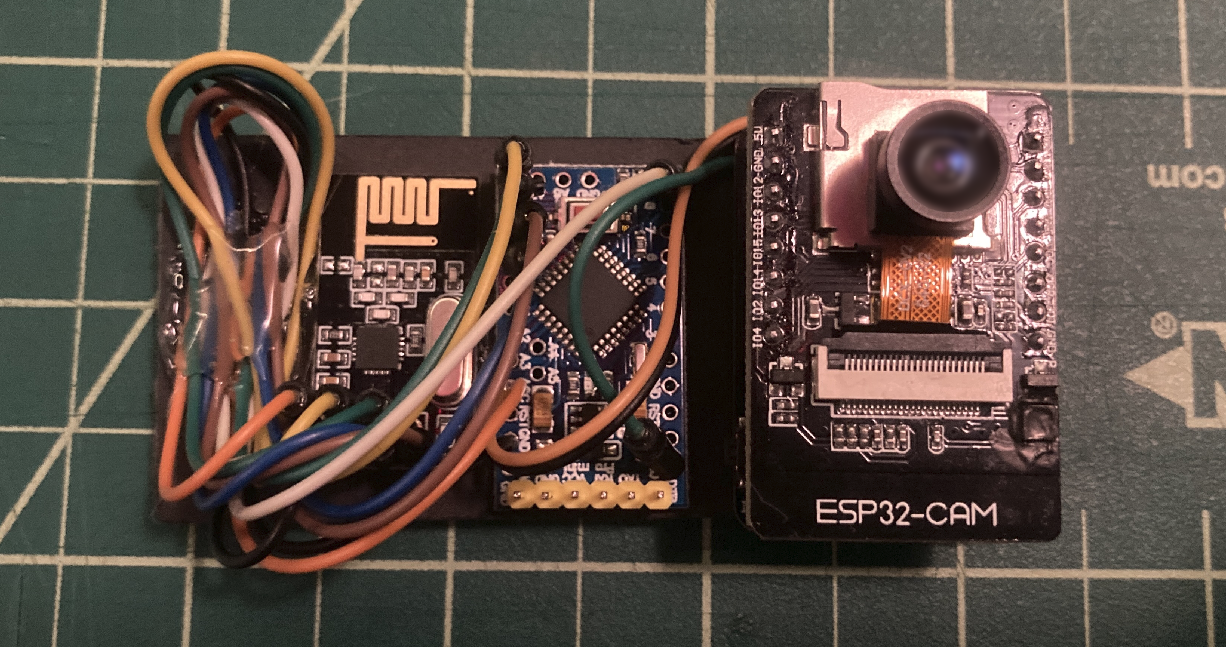
The second generation used an Arduino pro mini and the ESP32-Cam module. This design was smaller and mobile. Data logging was automatic and continuous. Using this device revealed an unknown source of RF which was from the console of the vehicle, shown in the video above.
After further investigation the source of the RF was the vehicle attempting to bind with a paired Bluetooth device. After removing the pairing, the vehicle no longer broadcasted RF.

Here is the python code used to plot the readings shown above.
# Python Code
import sys,os
import plotly.express as px
from numpy import genfromtxt
numpy_array = genfromtxt('NRF_Readings.csv', delimiter=',')
fig = px.imshow(numpy_array, color_continuous_scale='thermal')
fig.update_layout(width=640, height=1400, margin=dict(l=0, r=0, b=0, t=0), coloraxis_showscale=False)
fig.update_xaxes(showticklabels=False).update_yaxes(showticklabels=False)
# fig.show()
fig.write_image("NRF_Readings.png")
# Command - python3 NRF_Readings.py
# Source - https://plotly.com/python/heatmaps/
# https://plotly.com/python/imshow/
# https://pypi.org/project/plotly-express/
# https://www.cloudacm.com/?p=2674
# https://plotly.com/python/plotly-express/
# https://plotly.com/python/builtin-colorscales/
# aggrnyl agsunset blackbody bluered blues blugrn bluyl brwnyl
# bugn bupu burg burgyl cividis darkmint electric emrld
# gnbu greens greys hot inferno jet magenta magma
# mint orrd oranges oryel peach pinkyl plasma plotly3
# pubu pubugn purd purp purples purpor rainbow rdbu
# rdpu redor reds sunset sunsetdark teal tealgrn turbo
# viridis ylgn ylgnbu ylorbr ylorrd algae amp deep
# dense gray haline ice matter solar speed tempo
# thermal turbid armyrose brbg earth fall geyser prgn
# piyg picnic portland puor rdgy rdylbu rdylgn spectral
# tealrose temps tropic balance curl delta oxy edge
# hsv icefire phase twilight mrybm mygbm
# https://video.stackexchange.com/questions/32419/ffmpeg-vertical-pan-over-an-image-top-to-bottom-scrolling-effect
# Then make a video the scrolls the image.
# ffmpeg -f lavfi -i color=s=640x360 -i NRF24L01_Readings-128bit_MorningCommute_Aug14-0900_NoTimeStamp_NoTotalRF.png -filter_complex "[0][1]overlay=x=0:y=H-0.5*n" -vframes 6625 NRF24L01_Readings-128bit_MorningCommute_Aug14-0900_NoTimeStamp_NoTotalRF.mp4
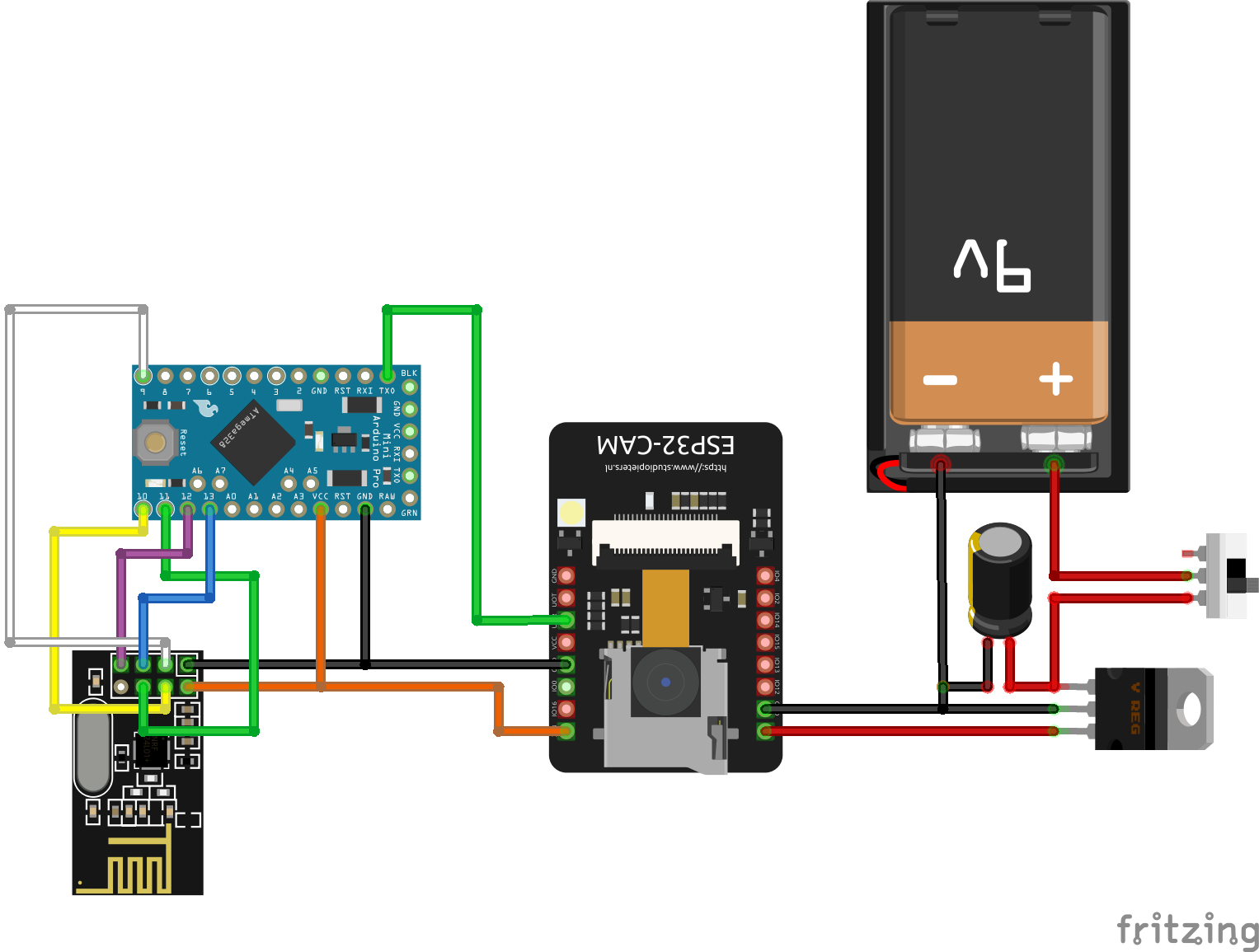
Here is the build interconnects and wiring when using the device with an external battery, however the build above used the ESP32-Cam module USB board.
Here is the microcontroller code used for the Arduino Pro Mini.
#include <SPI.h>
// Based off of this work, https://www.riyas.org/2013/12/working-quick-start-guide-for-nrf24l01.html
// Increased define CHANNELS from 64 to 256 in attempt to increase resolution
// Poor Man's Wireless 2.4GHz Scanner
//
// uses an nRF24L01p connected to an Arduino
//
// Cables are:
// SS -> 10 Chip Select Not - This is held to VCC to turn on chip, GPIO is not needed
// MOSI -> 11 Master Out Slave In - Now called PICO
// MISO -> 12 Master In Slave Out - Now called POCI
// SCK -> 13 Clock Signal
//
// GND and VCC sould have a 10uf capacitor between them
//
// and CE -> 9 Chip Enable - This is needed because SPI requires 2 way comms
//
// created March 2011 by Rolf Henkel
//
#define CE 9 // Chip Enable - This is needed because SPI requires 2 way comms
unsigned long myTime;
// Array to hold Channel data (32 = 1 sec, 64 = 2 sec, 128 = 4 sec, 256 = 8 sec, etc)
#define CHANNELS 64
int channel[CHANNELS];
// greyscale mapping
int line;
char grey[] = "0123456789";
// char grey[] = " .:-=+*aRW";
// nRF24L01P registers we need
#define _NRF24_CONFIG 0x00
#define _NRF24_EN_AA 0x01
#define _NRF24_RF_CH 0x05
#define _NRF24_RF_SETUP 0x06
#define _NRF24_RPD 0x09
// get the value of a nRF24L01p register
byte getRegister(byte r)
{
byte c;
PORTB &=~_BV(2);
c = SPI.transfer(r&0x1F);
c = SPI.transfer(0);
PORTB |= _BV(2);
return(c);
}
// set the value of a nRF24L01p register
void setRegister(byte r, byte v)
{
PORTB &=~_BV(2);
SPI.transfer((r&0x1F)|0x20);
SPI.transfer(v);
PORTB |= _BV(2);
}
// power up the nRF24L01p chip
void powerUp(void)
{
setRegister(_NRF24_CONFIG,getRegister(_NRF24_CONFIG)|0x02);
delayMicroseconds(130);
}
// switch nRF24L01p off
void powerDown(void)
{
setRegister(_NRF24_CONFIG,getRegister(_NRF24_CONFIG)&~0x02);
}
// enable RX
void enable(void)
{
PORTB |= _BV(1);
}
// disable RX
void disable(void)
{
PORTB &=~_BV(1);
}
// setup RX-Mode of nRF24L01p
void setRX(void)
{
setRegister(_NRF24_CONFIG,getRegister(_NRF24_CONFIG)|0x01);
enable();
// this is slightly shorter than
// the recommended delay of 130 usec
// - but it works for me and speeds things up a little...
delayMicroseconds(100);
}
// scanning all channels in the 2.4GHz band
void scanChannels(void)
{
disable();
for( int j=0 ; j<200 ; j++)
{
for( int i=0 ; i<CHANNELS ; i++)
{
// select a new channel
setRegister(_NRF24_RF_CH,(64*i)/CHANNELS);
// switch on RX
setRX();
// wait enough for RX-things to settle
delayMicroseconds(40);
// this is actually the point where the RPD-flag
// is set, when CE goes low
disable();
// read out RPD flag; set to 1 if
// received power > -64dBm
if( getRegister(_NRF24_RPD)>0 ) channel[i]++;
}
}
}
// outputs channel data as a simple grey map
void outputChannels(void)
{
int norm = 0;
// find the maximal count in channel array
for( int i=0 ; i<CHANNELS ; i++)
if( channel[i]>norm ) norm = channel[i];
// now output the data
for( int i=0 ; i<CHANNELS ; i++)
{
int pos;
// calculate grey value position
if( norm!=0 ) pos = (channel[i]*10)/norm;
else pos = 0;
// boost low values
if( pos==0 && channel[i]>0 ) pos++;
// clamp large values
if( pos>9 ) pos = 9;
// print it out
Serial.print(grey[pos]);
Serial.print(',');
channel[i] = 0;
}
// indicate overall power
Serial.print(norm);
Serial.print(',');
myTime = millis();
Serial.print(myTime);
Serial.println(',');
}
void setup()
{
Serial.begin(57600);
// Setup SPI
SPI.begin();
// Clock Speed, Bit Order, and Data Mode
SPI.beginTransaction(SPISettings(20000000, MSBFIRST, SPI_MODE0));
// Activate Chip Enable
pinMode(CE,OUTPUT);
disable();
// now start receiver
powerUp();
// switch off Shockburst
setRegister(_NRF24_EN_AA,0x0);
// make sure RF-section is set properly
// - just write default value...
setRegister(_NRF24_RF_SETUP,0x0F);
// reset line counter
line = 0;
}
void loop()
{
// do the scan
scanChannels();
// output the result
outputChannels();
}
Here is the microcontroller code used for the ESP32-Cam module.
/*********
Rui Santos
Complete project details at https://RandomNerdTutorials.com/esp32-cam-take-photo-save-microsd-card
IMPORTANT!!!
- Select Board "AI Thinker ESP32-CAM"
- GPIO 0 must be connected to GND to upload a sketch
- After connecting GPIO 0 to GND, press the ESP32-CAM on-board RESET button to put your board in flashing mode
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files.
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
*********/
#include "esp_camera.h"
#include "FS.h" // SD Card ESP32
#include "SD_MMC.h" // SD Card ESP32
const char* NRFReadings = "/NRF24L01_Readings.csv";
// Pin definition for CAMERA_MODEL_AI_THINKER
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
unsigned long pictureNumber = 0;
unsigned long photodelay = 0; // Time counter for timed photos
unsigned long delaytime = 3000; // Time of delay between each photo
void HardwareSetup()
{
// Note the format for setting a serial port is as follows:
// Serial.begin(baud-rate, protocol, RX pin, TX pin);
// initialize serial:
Serial.begin(57600);
}
void StartupCamera() {
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG; //YUV422,GRAYSCALE,RGB565,JPEG
config.frame_size = FRAMESIZE_XGA; // FRAMESIZE_ + QVGA (320 x 240) | CIF (352 x 288) |VGA (640 x 480) | SVGA (800 x 600) |XGA (1024 x 768) |SXGA (1280 x 1024) |UXGA (1600 x 1200)
config.jpeg_quality = 10; // 10-63 lower number means higher quality
config.fb_count = 1;
// Init Camera
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
return;
}
sensor_t * s = esp_camera_sensor_get();
s->set_whitebal(s, 0); // 0 = disable , 1 = enable
s->set_awb_gain(s, 0); // 0 = disable , 1 = enable
}
void StartupMicroSD() {
if(!SD_MMC.begin()){
return;
}
uint8_t cardType = SD_MMC.cardType();
if(cardType == CARD_NONE){
return;
}
}
//Append to the end of file in SD card
void appendFile(fs::FS &fs, const char * path, const char * message){
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
} else {
}
}
void CaptureImage() {
camera_fb_t * fb = NULL;
// Take Picture with Camera
fb = esp_camera_fb_get();
if(!fb) {
return;
}
// Construct a filename that looks like "/photo_0000000001.jpg"
pictureNumber = millis();
String filename = "/photo_";
if(pictureNumber < 1000000000) filename += "0";
if(pictureNumber < 100000000) filename += "0";
if(pictureNumber < 10000000) filename += "0";
if(pictureNumber < 1000000) filename += "0";
if(pictureNumber < 100000) filename += "0";
if(pictureNumber < 10000) filename += "0";
if(pictureNumber < 1000) filename += "0";
if(pictureNumber < 100) filename += "0";
if(pictureNumber < 10) filename += "0";
filename += pictureNumber;
filename += ".jpg";
// Path where new picture will be saved in SD Card
String imagefile = String(filename);
fs::FS &fs = SD_MMC;
File file = fs.open(imagefile.c_str(), FILE_WRITE);
file.write(fb->buf, fb->len); // payload (image), payload length
// file.close();
esp_camera_fb_return(fb);
}
void setup() {
StartupCamera();
StartupMicroSD();
HardwareSetup();
// Let things settle before logging
delay(3000);
}
void loop() {
if(Serial.available()) // if there is data comming
{
String inputString = Serial.readStringUntil('\n'); // read string until meet newline character
appendFile(SD_MMC, NRFReadings, inputString.c_str());
appendFile(SD_MMC, NRFReadings, "\n");
CaptureImage();
}
}
/*
Some Notes
*/
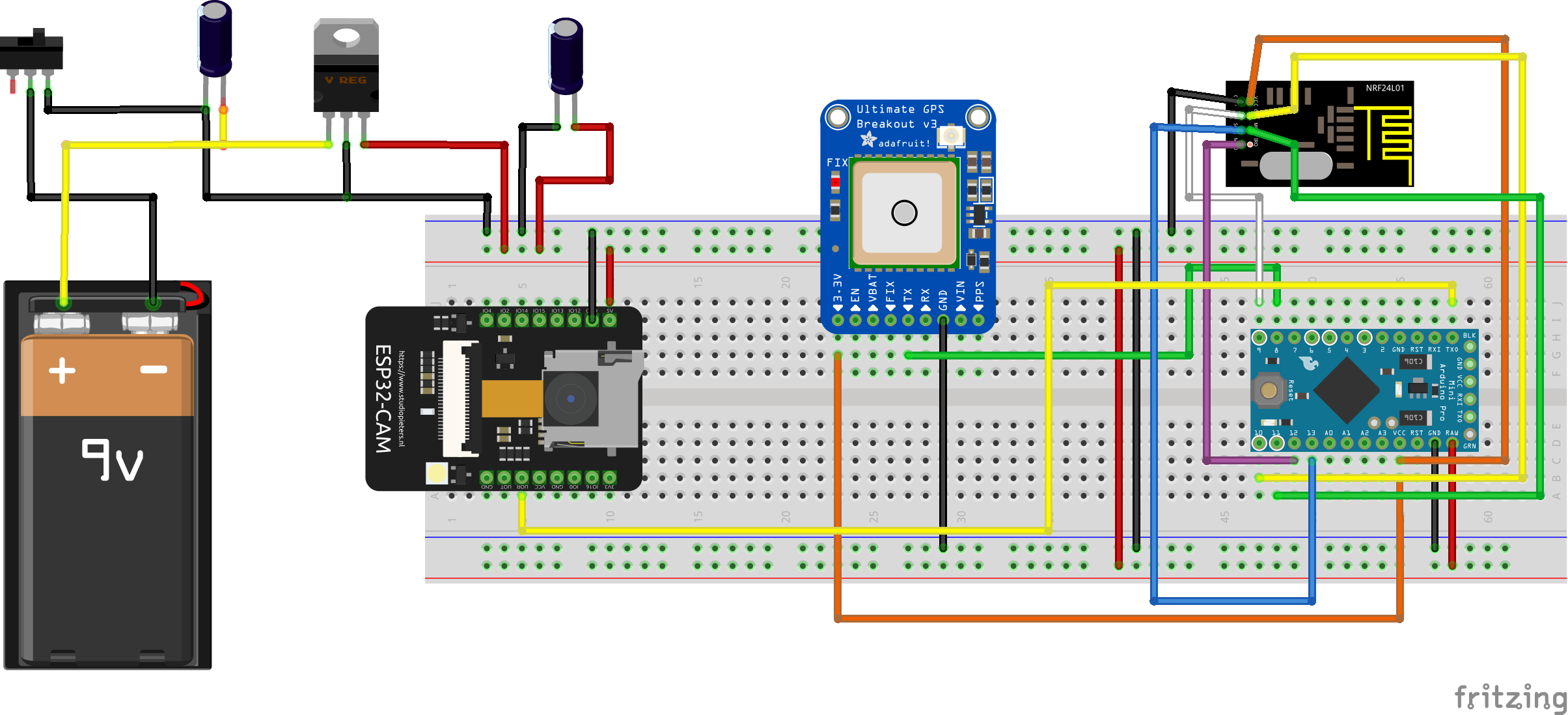
The third generation added a GPS module. Doing so allowed RF readings to be plotted in a geospatial domain. One of the biggest challenges in this design was the power distribution. Initially all power on the 3.3 V bus was provided by the ESP32-Cam module. That power configuration overloaded the 3.3 V regulator on the ESP32-Cam module, causing it to fail. The final power distribution provided 5 V separately to the ESP32-Cam module and the Arduino pro mini. Wi-Fi scanning was also introduced in this build.
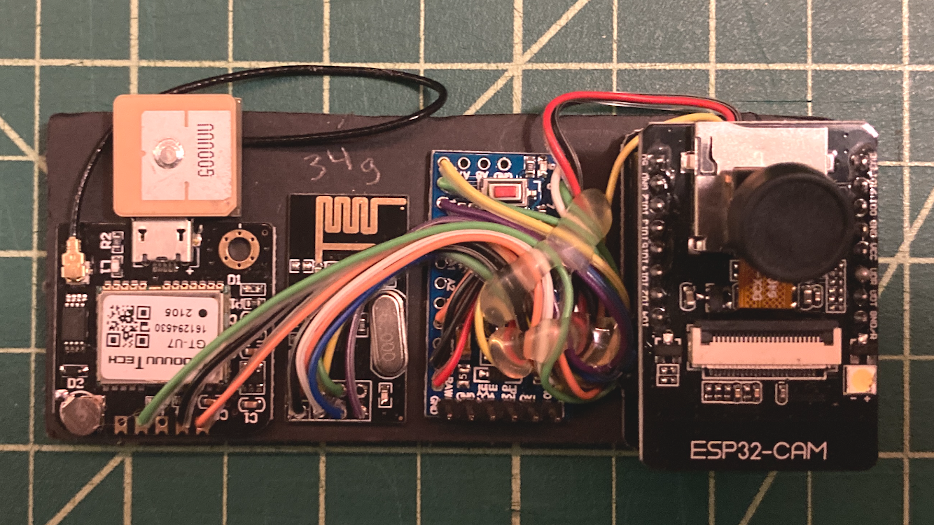
Here is a photo of the build which uses the ESP32-Cam module USB board instead of regulated battery source. As seen on the photo, the device is only 34 grams.
Here is the microcontroller code used on the Arduino Pro Mini for the GPS added configuration.
/**
Arduino_ProMini_NRF24L01-GPS-64bit-Ver1
Pro Mini Controller that monitors the following devices
NRF24L01 for 2.4 Ghz spectrum readings
GT-U7 GPS module vai software serial port
All readings are streamed out
Aug 27th, 2023 - 13:30
**/
// Libraries
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
SoftwareSerial SecondSerial(8, 7); // RX, TX
#include <SPI.h>
// Variables and Constants
// Set these based on your needs
// GPS Home, https://www.google.com/maps
static const double SixtyAcres_LAT = 47.702875, SixtyAcres_LON = -122.137535;
TinyGPSPlus gps; // The TinyGPS++ object
unsigned long last = 0UL; // For stats that happen every 5 seconds
int PadSeconds;
int PadMinutes;
int PadDays;
int PadMonths;
float OnboardSeconds;
unsigned long serialdelay = 0; // Time counter for timed GPS checks
unsigned long delaytime = 17000; // Time of delay to allow ESP32-Cam functions to run ( Wifi Scan 12 sec ) and ( Photo 5 sec )
// Increased define CHANNELS from 64 to 256 in attempt to increase resolution
// Poor Man's Wireless 2.4GHz Scanner
//
// uses an nRF24L01p connected to an Arduino
//
// Cables are:
// SS -> 10 Chip Select Not - This is held to VCC to turn on chip, GPIO is not needed
// MOSI -> 11 Master Out Slave In - Now called PICO
// MISO -> 12 Master In Slave Out - Now called POCI
// SCK -> 13 Clock Signal
//
// GND and VCC sould have a 10uf capacitor between them
//
// and CE -> 9 Chip Enable - This is needed because SPI requires 2 way comms
//
// created March 2011 by Rolf Henkel
// https://forum.arduino.cc/t/poor-mans-2-4-ghz-scanner/54846
//
#define CE 9 // Chip Enable - This is needed because SPI requires 2 way comms
unsigned long myTime;
// Array to hold Channel data (32 = 1 sec, 64 = 2 sec, 128 = 4 sec, 256 = 8 sec, etc)
#define CHANNELS 128
int channel[CHANNELS];
// greyscale mapping
int line;
char grey[] = "0123456789";
// char grey[] = " .:-=+*aRW";
// nRF24L01P registers we need
#define _NRF24_CONFIG 0x00
#define _NRF24_EN_AA 0x01
#define _NRF24_RF_CH 0x05
#define _NRF24_RF_SETUP 0x06
#define _NRF24_RPD 0x09
// get the value of a nRF24L01p register
byte getRegister(byte r)
{
byte c;
PORTB &=~_BV(2);
c = SPI.transfer(r&0x1F);
c = SPI.transfer(0);
PORTB |= _BV(2);
return(c);
}
// set the value of a nRF24L01p register
void setRegister(byte r, byte v)
{
PORTB &=~_BV(2);
SPI.transfer((r&0x1F)|0x20);
SPI.transfer(v);
PORTB |= _BV(2);
}
// power up the nRF24L01p chip
void powerUp(void)
{
setRegister(_NRF24_CONFIG,getRegister(_NRF24_CONFIG)|0x02);
delayMicroseconds(130);
}
// switch nRF24L01p off
void powerDown(void)
{
setRegister(_NRF24_CONFIG,getRegister(_NRF24_CONFIG)&~0x02);
}
// enable RX
void enable(void)
{
PORTB |= _BV(1);
}
// disable RX
void disable(void)
{
PORTB &=~_BV(1);
}
// setup RX-Mode of nRF24L01p
void setRX(void)
{
setRegister(_NRF24_CONFIG,getRegister(_NRF24_CONFIG)|0x01);
enable();
// this is slightly shorter than
// the recommended delay of 130 usec
// - but it works for me and speeds things up a little...
delayMicroseconds(100);
}
// scanning all channels in the 2.4GHz band
void scanChannels(void)
{
disable();
for( int j=0 ; j<200 ; j++)
{
for( int i=0 ; i<CHANNELS ; i++)
{
// select a new channel
setRegister(_NRF24_RF_CH,(64*i)/CHANNELS);
// switch on RX
setRX();
// wait enough for RX-things to settle
delayMicroseconds(40);
// this is actually the point where the RPD-flag
// is set, when CE goes low
disable();
// read out RPD flag; set to 1 if
// received power > -64dBm
if( getRegister(_NRF24_RPD)>0 ) channel[i]++;
}
}
}
// outputs channel data as a simple grey map
void outputChannels(void)
{
int norm = 0;
// find the maximal count in channel array
for( int i=0 ; i<CHANNELS ; i++)
if( channel[i]>norm ) norm = channel[i];
// now output the data
for( int i=0 ; i<CHANNELS ; i++)
{
int pos;
// calculate grey value position
if( norm!=0 ) pos = (channel[i]*10)/norm;
else pos = 0;
// boost low values
if( pos==0 && channel[i]>0 ) pos++;
// clamp large values
if( pos>9 ) pos = 9;
// print it out
Serial.print(grey[pos]);
Serial.print(',');
channel[i] = 0;
}
// indicate overall power
Serial.print(norm);
Serial.print(',');
myTime = millis();
Serial.print(myTime);
Serial.print(',');
}
// Printout Millis Timestamp
void PrintOutMillis()
{
// OnboardSeconds = millis();
// OnboardSeconds = OnboardSeconds/1000;
// Serial.print(OnboardSeconds, 3);
myTime = millis();
Serial.print(myTime);
Serial.print(",");
}
// Printout Location Routine
void PrintOutLocation()
{
String StringLat = String(gps.location.lat(), 6);
String StringLong = String(gps.location.lng(), 6);
String Location = String(StringLat + "," + StringLong + ",");
Serial.print(Location);
}
// Printout Date Routine
void PrintOutDate()
{
PadMonths = gps.date.month();
if (PadMonths < 10)
{
Serial.print("0");
}
String StringMonth = String(gps.date.month());
Serial.print(StringMonth);
Serial.print("/");
PadDays = gps.date.day();
if (PadDays < 10)
{
Serial.print("0");
}
String StringDay = String(gps.date.day());
Serial.print(StringDay);
Serial.print("/");
String StringYear = String(gps.date.year());
Serial.print(StringYear);
Serial.print(",");
}
// Printout Time Routine
void PrintOutTime()
{
String StringHour = String(gps.time.hour());
Serial.print(StringHour);
Serial.print(":");
PadMinutes = gps.time.minute();
if (PadMinutes < 10)
{
Serial.print("0");
}
String StringMinutes = String(gps.time.minute());
Serial.print(StringMinutes);
Serial.print(":");
PadSeconds = gps.time.second();
if (PadSeconds < 10)
{
Serial.print("0");
}
String StringSeconds = String(gps.time.second());
Serial.print(StringSeconds);
Serial.print(",");
}
// Printout Speed Routine
void PrintOutSpeed()
{
String StringMph = String(gps.speed.mph());
Serial.print(StringMph);
Serial.print(",");
}
// Printout Course Routine
void PrintOutCourse()
{
String StringCourse = String(gps.course.deg());
Serial.print(StringCourse);
Serial.print(",");
}
// Printout Altitude Routine
void PrintOutAltitude()
{
String StringAltitude = String(gps.altitude.feet());
Serial.print(StringAltitude);
Serial.print(",");
}
// Reference Bearing Routine
void BearingReference()
{
double distanceToSixtyAcres =
TinyGPSPlus::distanceBetween(
gps.location.lat(),
gps.location.lng(),
SixtyAcres_LAT,
SixtyAcres_LON);
double courseToSixtyAcres =
TinyGPSPlus::courseTo(
gps.location.lat(),
gps.location.lng(),
SixtyAcres_LAT,
SixtyAcres_LON);
String StringDistToHome = String(distanceToSixtyAcres/1609, 6);
Serial.print(StringDistToHome);
Serial.print(",");
String StringCourseToHome = String(courseToSixtyAcres, 6);
Serial.print(StringCourseToHome);
Serial.print(",");
String StringCardinal = String(TinyGPSPlus::cardinal(courseToSixtyAcres));
Serial.print(StringCardinal);
Serial.print(',');
}
// End of serial message
void SerialMessageEnd()
{
Serial.print("^"); // Break Character for end of serial data message
}
// This custom version of delay() ensures that the gps object
// is being "fed".
// source https://forum.arduino.cc/t/tinygps-dont-run-the-sketch-until-gps-is-fixed/1053105
void gpsLock()
{
// Keep waiting until the fix is valid
while( !gps.location.isValid() )
{
unsigned long start = millis();
do
{
while (SecondSerial.available())
gps.encode(SecondSerial.read());
}
while (millis() - start < 1000);
// if (millis() > 5000 && gps.charsProcessed() < 10)
// Serial.println(F("No GPS data received: check wiring"));
}
}
// give ESP-32 Cam module time to complete its functions before providing serial readings
void ESP32CamWait()
{
serialdelay = millis();
while (millis() - serialdelay < delaytime) {
// I'm not waiting on a lady, I'm just waiting on a friend - https://www.youtube.com/watch?v=MKLVmBOOqVU
}
}
// Printout Global Results Routine
void PrintOutGlobalReadings()
{
PrintOutMillis ();
PrintOutLocation();
PrintOutDate();
PrintOutTime();
PrintOutSpeed();
PrintOutCourse();
PrintOutAltitude();
BearingReference();
SerialMessageEnd();
}
void setup()
{
Serial.begin(57600);
SecondSerial.begin(9600);
delay(1000); // give GPS time to settle
// Setup SPI
SPI.begin();
// Clock Speed, Bit Order, and Data Mode
SPI.beginTransaction(SPISettings(20000000, MSBFIRST, SPI_MODE0));
// Activate Chip Enable
pinMode(CE,OUTPUT);
disable();
// now start receiver
powerUp();
// switch off Shockburst
setRegister(_NRF24_EN_AA,0x0);
// make sure RF-section is set properly
// - just write default value...
setRegister(_NRF24_RF_SETUP,0x0F);
// reset line counter
line = 0;
}
void loop()
{
// wait for gps to get a valid lock
gpsLock();
// do the scan with nrf24l01
scanChannels();
// output the results from nrf24l01
outputChannels();
// monitor for serial data from gps
// InboundSerialData();
// output the results from gps
PrintOutGlobalReadings();
// give ESP-32 Cam module time to complete its functions before providing serial readings
ESP32CamWait();
}
Here is the microcontroller code used on the ESP32-Cam module.
/*********
Rui Santos
Complete project details at https://RandomNerdTutorials.com/esp32-cam-take-photo-save-microsd-card
IMPORTANT!!!
- Select Board "AI Thinker ESP32-CAM"
- GPIO 0 must be connected to GND to upload a sketch
- After connecting GPIO 0 to GND, press the ESP32-CAM on-board RESET button to put your board in flashing mode
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files.
The above copyright notice and this permission notice shall be included in all
copies or substantial portions of the Software.
*********/
#include "WiFi.h"
#include "esp_camera.h"
#include "FS.h" // SD Card ESP32
#include "SD_MMC.h" // SD Card ESP32
const char* NRFReadings = "/NRF-GPS-Wifi_Readings.csv";
// Pin definition for CAMERA_MODEL_AI_THINKER
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
unsigned long pictureNumber = 0;
unsigned long photodelay = 0; // Time counter for timed photos
unsigned long delaytime = 5000; // Time of delay between each photo
void HardwareSetup()
{
// Note the format for setting a serial port is as follows:
// Serial.begin(baud-rate, protocol, RX pin, TX pin);
// initialize serial:
Serial.begin(57600);
WiFi.mode(WIFI_STA);
WiFi.disconnect();
delay(100);
}
void StartupCamera() {
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG; //YUV422,GRAYSCALE,RGB565,JPEG
config.frame_size = FRAMESIZE_UXGA; // FRAMESIZE_ + QVGA (320 x 240) | CIF (352 x 288) |VGA (640 x 480) | SVGA (800 x 600) |XGA (1024 x 768) |SXGA (1280 x 1024) |UXGA (1600 x 1200)
config.jpeg_quality = 10; // 10-63 lower number means higher quality
config.fb_count = 1;
// Init Camera
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
return;
}
sensor_t * s = esp_camera_sensor_get();
s->set_whitebal(s, 0); // 0 = disable , 1 = enable
s->set_awb_gain(s, 0); // 0 = disable , 1 = enable
}
void StartupMicroSD() {
if(!SD_MMC.begin()){
return;
}
uint8_t cardType = SD_MMC.cardType();
if(cardType == CARD_NONE){
return;
}
}
//Append to the end of file in SD card
void appendFile(fs::FS &fs, const char * path, const char * message){
File file = fs.open(path, FILE_APPEND);
if(!file){
return;
}
if(file.print(message)){
} else {
}
}
void CaptureImage() {
camera_fb_t * fb = NULL;
// Take Picture with Camera
fb = esp_camera_fb_get();
if(!fb) {
return;
}
// Construct a filename that looks like "/photo_0000000001.jpg"
pictureNumber = millis();
String filename = "/photo_";
if(pictureNumber < 1000000000) filename += "0";
if(pictureNumber < 100000000) filename += "0";
if(pictureNumber < 10000000) filename += "0";
if(pictureNumber < 1000000) filename += "0";
if(pictureNumber < 100000) filename += "0";
if(pictureNumber < 10000) filename += "0";
if(pictureNumber < 1000) filename += "0";
if(pictureNumber < 100) filename += "0";
if(pictureNumber < 10) filename += "0";
filename += pictureNumber;
filename += ".jpg";
// Path where new picture will be saved in SD Card
String imagefile = String(filename);
fs::FS &fs = SD_MMC;
File file = fs.open(imagefile.c_str(), FILE_WRITE);
file.write(fb->buf, fb->len); // payload (image), payload length
// file.close();
esp_camera_fb_return(fb);
}
void ScanWifiNetworks()
{
// WiFi.scanNetworks will return the number of networks found.
int IntWifiNetworks = WiFi.scanNetworks();
if (IntWifiNetworks == 0) {
}
else {
String MillisString = String(millis()); // read string until meet newline character
appendFile(SD_MMC, NRFReadings, MillisString.c_str());
appendFile(SD_MMC, NRFReadings, ",");
String StringWifiNetworks = String(IntWifiNetworks); // read string until meet newline character
appendFile(SD_MMC, NRFReadings, StringWifiNetworks.c_str());
appendFile(SD_MMC, NRFReadings, ",");
for (int NetworkCount = 0; NetworkCount < IntWifiNetworks; ++NetworkCount)
{
String StringSSID = String(WiFi.SSID(NetworkCount));
appendFile(SD_MMC, NRFReadings, StringSSID.c_str());
appendFile(SD_MMC, NRFReadings, ",");
String StringRSSI = String(WiFi.RSSI(NetworkCount));
appendFile(SD_MMC, NRFReadings, StringRSSI.c_str());
appendFile(SD_MMC, NRFReadings, ",");
String StringBSSIDstr = String(WiFi.BSSIDstr(NetworkCount));
appendFile(SD_MMC, NRFReadings, StringBSSIDstr.c_str());
appendFile(SD_MMC, NRFReadings, ",");
String StringChannel = String(WiFi.channel(NetworkCount));
appendFile(SD_MMC, NRFReadings, StringChannel.c_str());
appendFile(SD_MMC, NRFReadings, ",");
printEncryptionType(WiFi.encryptionType(NetworkCount));
appendFile(SD_MMC, NRFReadings, ",");
}
}
// Delete the scan result to free memory for code below.
WiFi.scanDelete();
}
void printEncryptionType(int thisType) {
// read the encryption type and print out the name:
switch (thisType) {
case WIFI_AUTH_OPEN:
appendFile(SD_MMC, NRFReadings, "open");
break;
case WIFI_AUTH_WEP:
appendFile(SD_MMC, NRFReadings, "WEP");
break;
case WIFI_AUTH_WPA_PSK:
appendFile(SD_MMC, NRFReadings, "WPA");
break;
case WIFI_AUTH_WPA2_PSK:
appendFile(SD_MMC, NRFReadings, "WPA2");
break;
case WIFI_AUTH_WPA_WPA2_PSK:
appendFile(SD_MMC, NRFReadings, "WPA+WPA2");
break;
case WIFI_AUTH_WPA2_ENTERPRISE:
appendFile(SD_MMC, NRFReadings, "WPA2-EAP");
break;
case WIFI_AUTH_WPA3_PSK:
appendFile(SD_MMC, NRFReadings, "WPA3");
break;
case WIFI_AUTH_WPA2_WPA3_PSK:
appendFile(SD_MMC, NRFReadings, "WPA2+WPA3");
break;
case WIFI_AUTH_WAPI_PSK:
appendFile(SD_MMC, NRFReadings, "WAPI");
break;
default:
appendFile(SD_MMC, NRFReadings, "unknown");
}
}
void setup() {
StartupCamera();
StartupMicroSD();
HardwareSetup();
// Let things settle before logging
delay(1000);
}
void loop() {
// Wait for serial data input, then perform internal functions
if(Serial.available()) // if there is data comming
{
String inputString = Serial.readStringUntil('^'); // read string until meet newline character
appendFile(SD_MMC, NRFReadings, inputString.c_str());
// This can take 12 seconds to complete
ScanWifiNetworks();
appendFile(SD_MMC, NRFReadings, "\n");
// This can take 5 seconds to complete
CaptureImage();
}
}
/*
Some Notes
*/
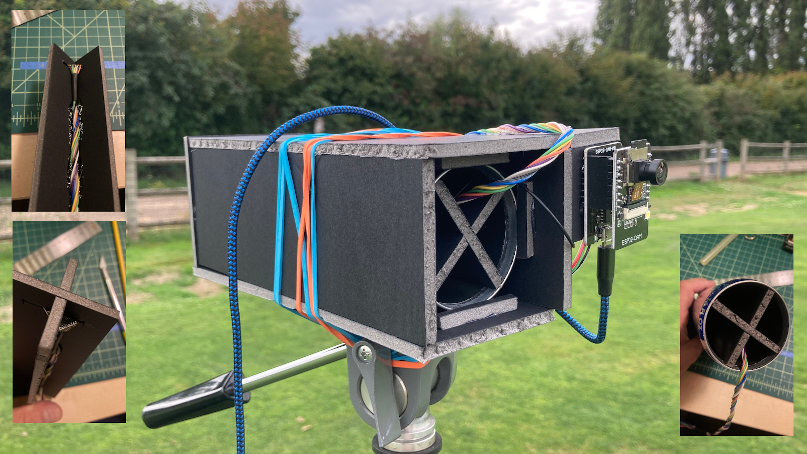
Field tests were inconclusive as to what RF was being detected by the NRF module in relation with the ESP32-Cam Wi-Fi scan. A fourth generation scanner was hastily made. The purpose of this scanner was to focus RF reception with a directional antenna. An arbitrary can was used and the NRF module was placed inside the can. This configuration did not include a GPS module, but did include a Compass sensor. in addition to the scanner modules, a ESP32-Cam module was used separately to photograph where the antenna was pointing with each reading. It was discovered later on that the Compass module had a fault, and the bearing would have to be provided by the photos. This configuration did not include Wi-Fi scanning.
Readings from the directional antenna were limited to RF in close proximity. This range limitation was noted by others, see https://hallard.me/nrf24l01-real-life-range-test/. The less likely cause of this is from the antenna dimensions not being at center frequency. Additional attempts were made to detect the radio frequency source however there were no bearing readings to cross reference.
One possible design consideration would be a tuned antenna in a polar array. The polar array would consist of at least four quadrants as well as a device to provide bearing. The quadrants would spread out like petals from a flower. If an RF source was from a given direction, the pedals closest in that direction would indicate a higher reading. This device would operate best from a higher altitude with line of sight to the RF source. This presents a challenge because the aircraft would need to be equipped with a radio that operates outside of the frequency being surveyed.
The effectiveness of RF scanning to locate a source is highly dependent on some known limitations. FCC regulations dictate how much power a standard Wi-Fi transmitter can operate at. The NRF module has a set sensitivity, which is documented in its data sheet. Power loss from a radio signal follows an inverse square constant. See this link for more information, https://helpfulcolin.com/radio-wave-power-and-how-it-gets-reduced-by-distance/. Knowing the maximum transmit power and the sensitivity limit, the inverse power constant can be applied to determine how far the NRF will receive a signal. Do keep in mind that these are ideal conditions with outside factors not considered.
The other challenge is building a wave guide that is small enough to fit on a model RC aircraft, but efficient enough to propagate the Wi-Fi frequency. Based on the wavelenght of 2.4Ghz RF (2.4 Ghz RF λ = 12.4913524166667 cm), the parabola would be roughly 5 inches or 12.5 cm across. This means the array would likely be 1 foot across. Keeping the array thin enough so it reamains aerodynamic will result in a narrow horizontal beam. So this device has many hurdles to overcome in order to provide an accurate location. Using multiple devices to triagulate adds a whole level of complexity well outside to scope of this post.